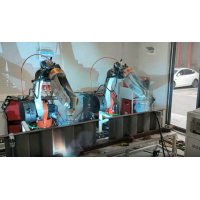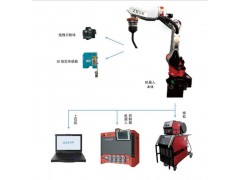






工作站集成了包括力觉传感器和视觉传感器组成的机器人高度灵敏感知系 统。使用时只需要把机器人拖拽到焊接起点,视觉系统便会自动识别焊缝位置。 切换到再现运行即可开始焊接,并且在焊接过程中能够实时跟踪焊缝位置。
智哥 3D 视觉跟踪+拖拽示教弧焊工作站,能够实现焊接前的快速示教,焊机 中的实时跟踪定位。结合智哥自研算法可轻松实现拖动轨迹记录与再现,焊缝起 始点寻位,工件二次定位纠偏等功能
|
公司基本资料信息
|
|||||||||||||||||||||||||||
工作站集成了包括力觉传感器和视觉传感器组成的机器人高度灵敏感知系 统。使用时只需要把机器人拖拽到焊接起点,视觉系统便会自动识别焊缝位置。 切换到再现运行即可开始焊接,并且在焊接过程中能够实时跟踪焊缝位置。
智哥 3D 视觉跟踪+拖拽示教弧焊工作站,能够实现焊接前的快速示教,焊机 中的实时跟踪定位。结合智哥自研算法可轻松实现拖动轨迹记录与再现,焊缝起 始点寻位,工件二次定位纠偏等功能